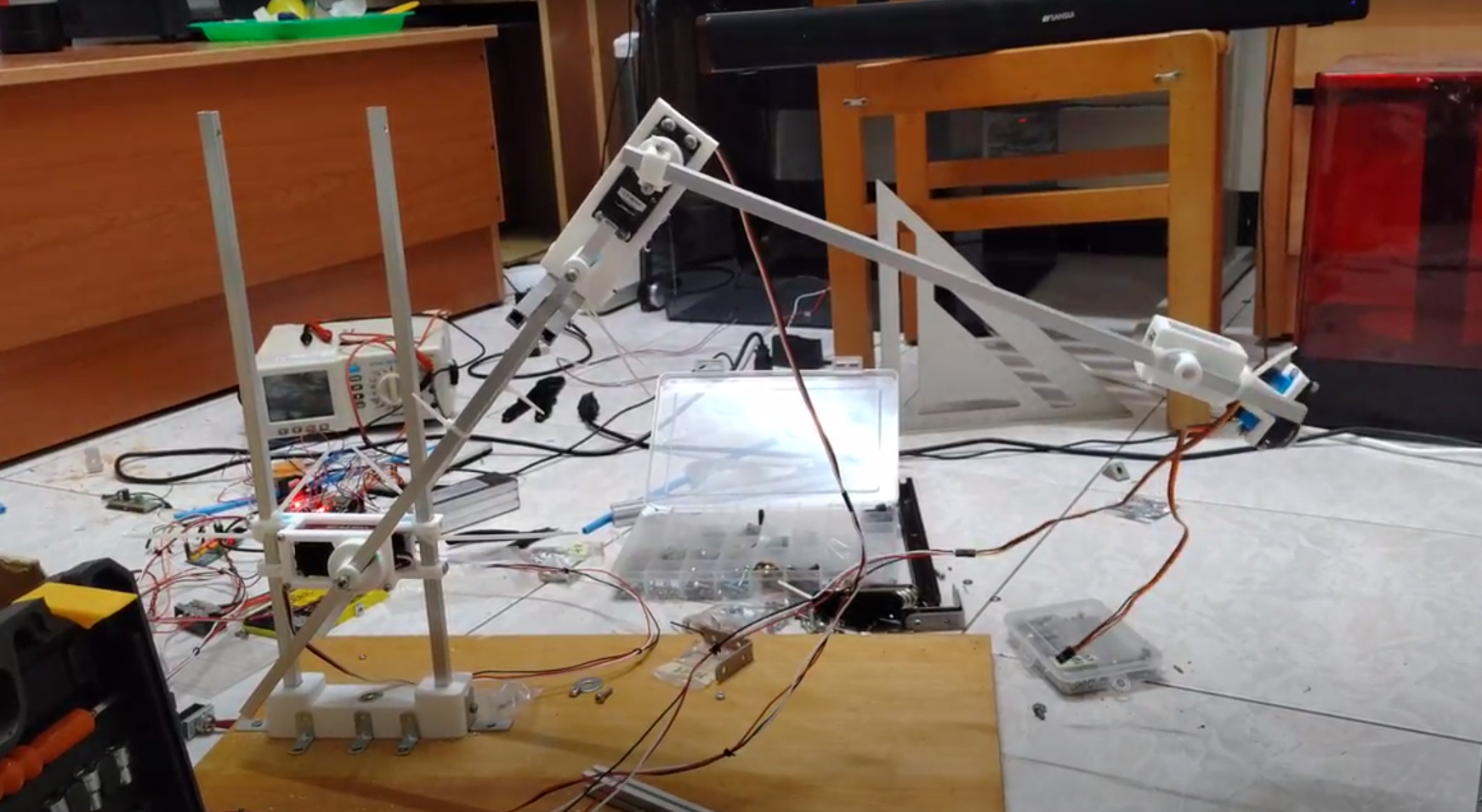
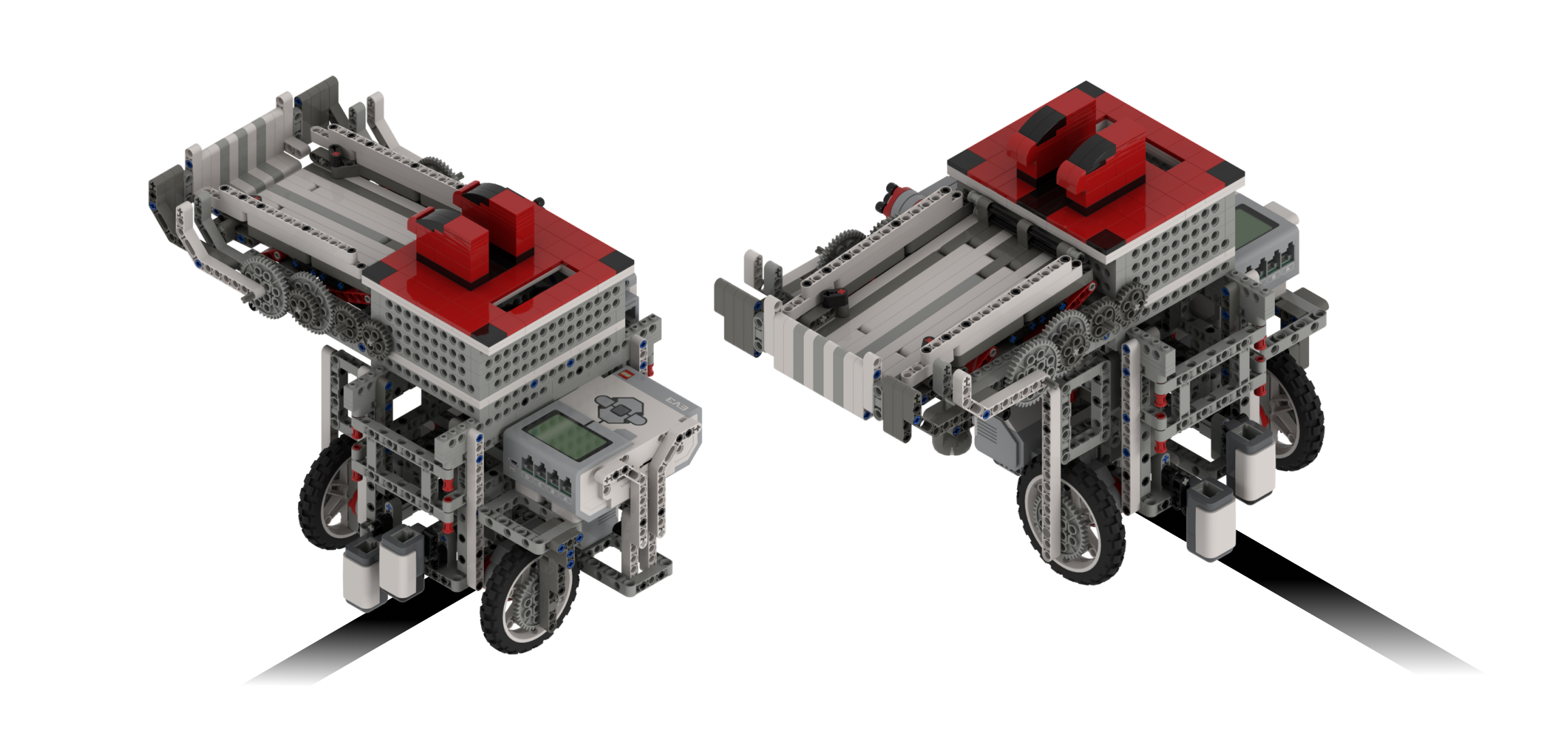
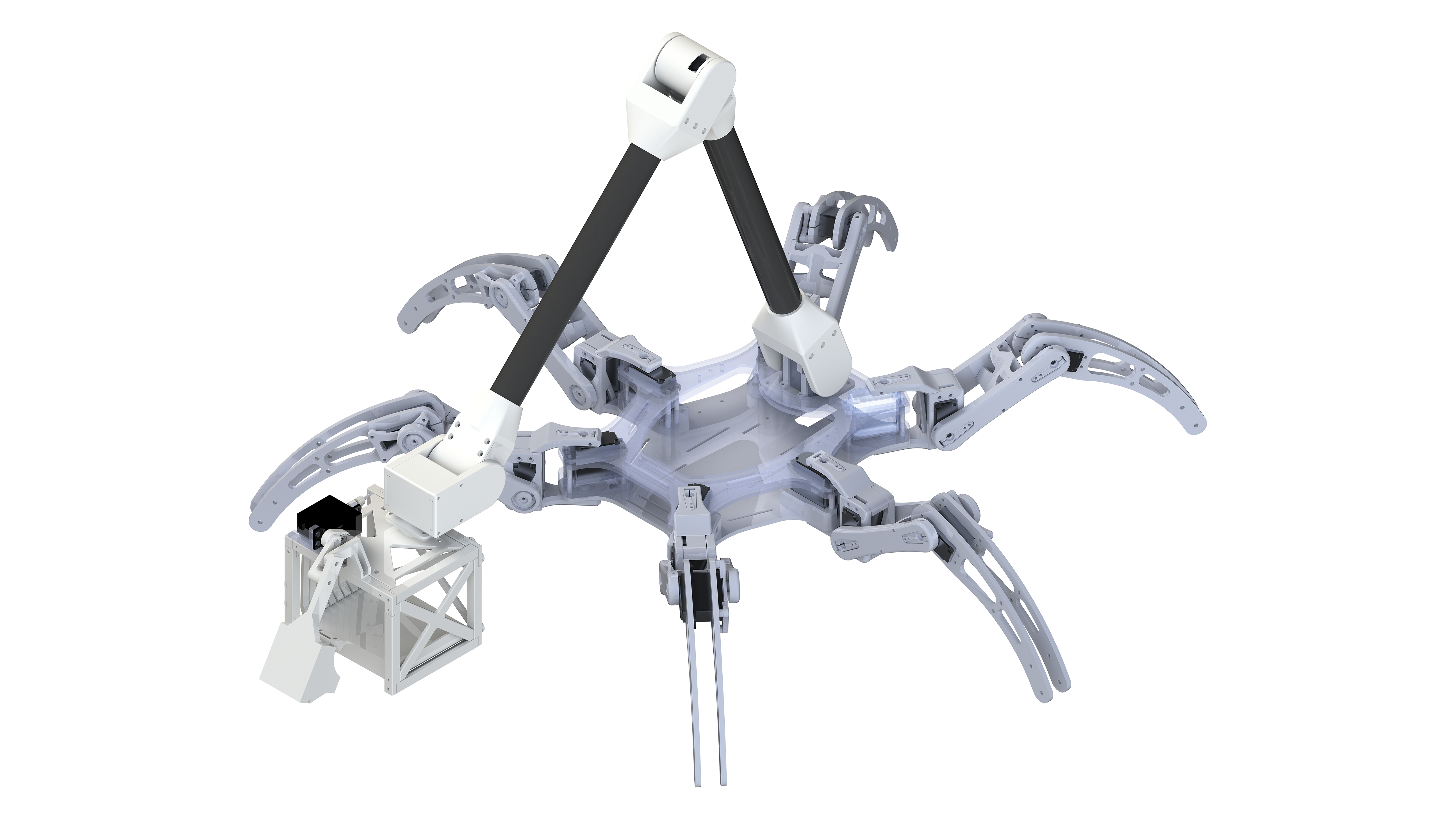
Since we need to grab target items, I came up with several ideas that keeps actions simple while giving it a clean look.
Duration:
2023 Feb — 2023 Nov
Team:
Ethan Chen, Jerry Lo, Ai-yung Chen, Howard Liu, Avery Lin, Sophie Chou
Role:
CEO, programmer, mechanical design, corporate identity design, poster
Skills:
2D design, 3D design, software integration, entrepreneurship
Duration:
2023 Feb — now
Team:
Ethan Chen, Jerry Lo, Ai-yung Chen, Howard Liu, Avery Lin, Sophie Chou
Skills:
2D design, 3D design, software integration, entrepreneurship
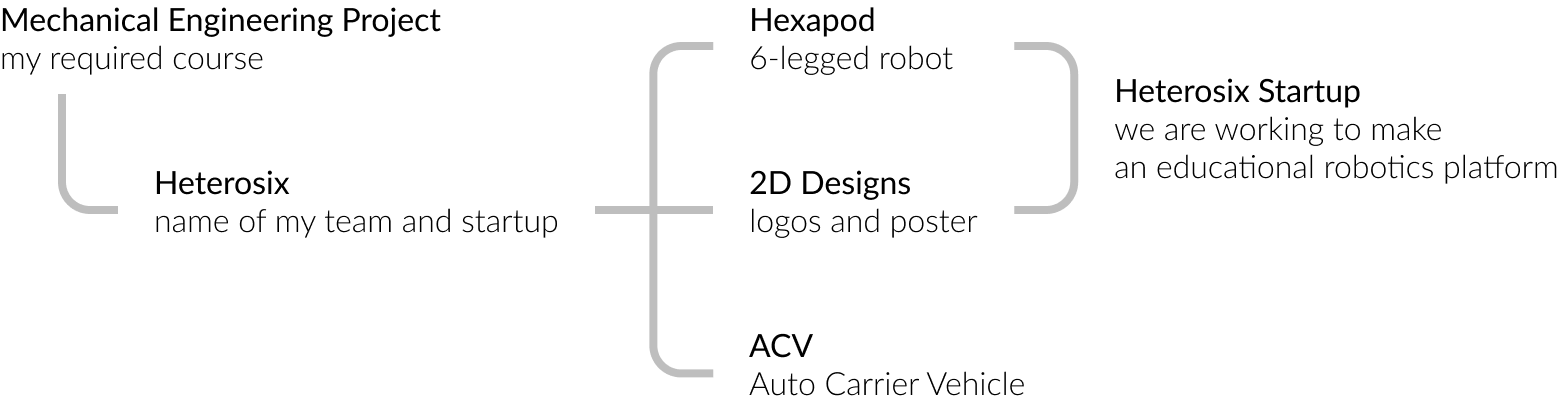
Overview: